手首や脚の圧迫による力覚提示
一般的な力覚提示
コンピュータで作成した本物ではない世界をあたかも現実であるかのように知覚することをバーチャルリアリティといいます。現在、普及しているバーチャルリアリティの多くはコンピュータゲームのように視覚と聴覚で世界を知覚させるものですが、触覚や力覚を提示する技術も開発されています。現在、もっとも多く用いられている力覚を提示する装置は、図1に示すようなロボットアームの先端にペンなどのハンドルを取り付けた装置です。ユーザーがつかんだハンドルをロボットアームで動かすことによって、ユーザーに力覚を知覚させます。
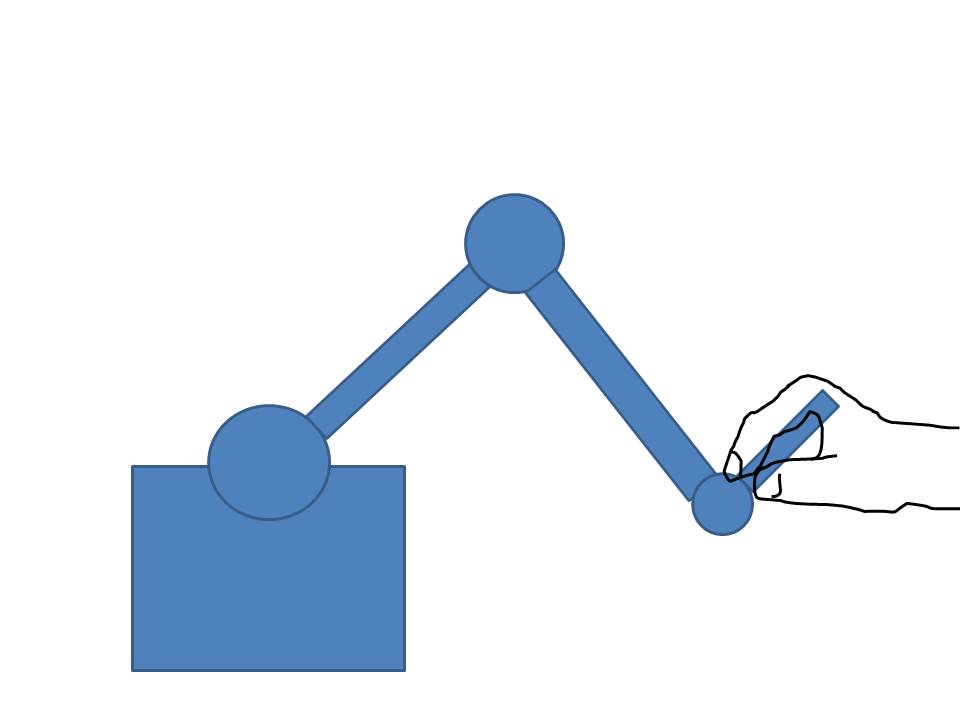
図1 一般的な力覚提示装置
このタイプの力覚提示装置ではユーザーに大きな力を知覚させるためには大きなロボットアームが必要となります。また、ヘッドマウントディスプレィ(HMD)をつけて歩き回ることができるバーチャルリアリティでこの装置を利用するためには、装置がユーザーと一緒に移動するか、ユーザーに装置を取り付ける(ウエアラブルにする)必要があり容易ではありません。
前腕の圧迫による力覚提示
本研究室では図2に示すように前腕遠位部(手首のやや肘側の部位)を圧迫することで力覚を提示する手法を提案しています[1]。また、前腕だけでなく手のひらを同時に圧迫するとさらにリアルな感覚にすることができます[2]。この手法は、空気圧カフ(血圧測定で用いるカフと同等のもの)をユーザーの前腕に取り付けるだけでよいので、装置の重量が使用感を損なうことがなく、装着も簡単です。

図2 前腕の圧迫による力覚提示
この手法は経験的に得られた知見を利用して考案したもので、前腕を圧迫して力覚が生起する理由はまだ明らかに出来ていません。しかし、前腕を圧迫して肘を曲げ伸ばしすると、実際に物を持ったときと同じように上腕二頭筋の活動が増すことが確認できています[3]。
脚の圧迫による力覚提示
上述した前腕圧迫による力覚提示と同様に、下腿を圧迫することで脚をやや重く感じさせることができます。また足を上げ下げするときの大腿二頭筋の筋活動は、実際に足に負荷がかかった時と同じように下腿の圧迫によって増加します[4]。この手法によって雪面や沼地などを歩行・走行する感覚を作り出せると考えています。
応用例

図4 バーチャルスキューバダイビング
両手と両脚に空気圧カフを装着し、手で水をかいだり、足で水を蹴った際にそれぞれを圧迫して力覚を提示します。手足の動きと頭の動きを検出して移動方向を制御しています。
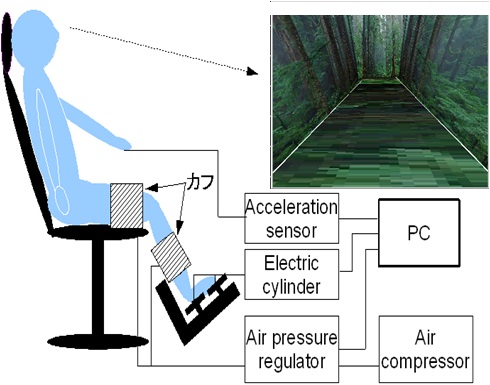
図5 バーチャルウオーキング
椅子に座った状態で左右の手を交互に振ると、歩いているかのように画面が動き、足が交互に持ち上がります。また、足の動きに合わせて下腿と大腿を圧迫することで、よりリアルな歩行感覚を生成します[5]。
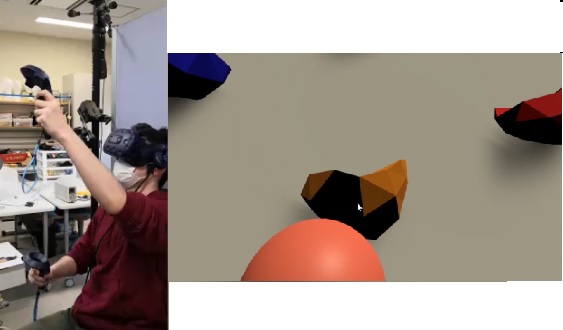
図6 バーチャルボルダリング
HMDを装着して、コントローラで突起をつかみ、壁を登ります。 手に力が入るときに手首を圧迫することで、手に力が入る感覚が生じます[6]。 現在は両手と両足で壁を登る感覚の提示システム[7]や、坂道を歩く感覚の提示システム、砂浜を歩く感覚の提示システムを開発しています。
参考文献
[1] 満田 隆 (2007). 手首圧迫による擬似力覚の提示. 日本バーチャルリアリティ学会論文誌,Vol.12, No.4, pp.577-584.
[2] Takashi Mitsuda (2013). Pseudo force display that applies pressure to the forearms. PRESENCE: Teleoperators and Virtual Environments, Vol.22, No.3, 191-201. doi:10.1162/PRES_a_00150
[3] 満田 隆, 田中 伸治 (2014).前腕圧迫による重量感提示時の上肢筋活動. 日本バーチャルリアリティ学会論文誌, Vol.19, No.4, pp.449-456.
[4] 満田 隆, 芳谷 博雄 (2013). 下腿遠位部圧迫による重量感の提示. 日本バーチャルリアリティ学会論文誌, Vol.18, No.3, pp.415-420.
[5] 織田 修平,満田 隆 (2008). 下肢圧迫による歩行感覚提示装置の開発. 計測自動制御学会システムインテグレーション部門講演会,2J2-1, pp.803-804.
[6] 戸田 貴仁, 臼井 裕貴, 満田 隆 (2021). 力覚を提示するVRボルダリングシステムの開発. 第26回日本バーチャルリアリティ学会大会, 2E1-1.
[7] Takashi Mitsuda, Shoichi Kimura (2026). Virtual climbing: climb in place with four limbs. Frontiers in Virtual Reality, Vol.7, 1764455, 2026.