内部真空圧により剛性が変化する機械要素
キーワード: 可変剛性、機械拘束、粒子内蔵型機械拘束要素、陰圧式固定具、粒子ジャミング、真空、空気圧、ソフトメカニズム、柔軟ロボット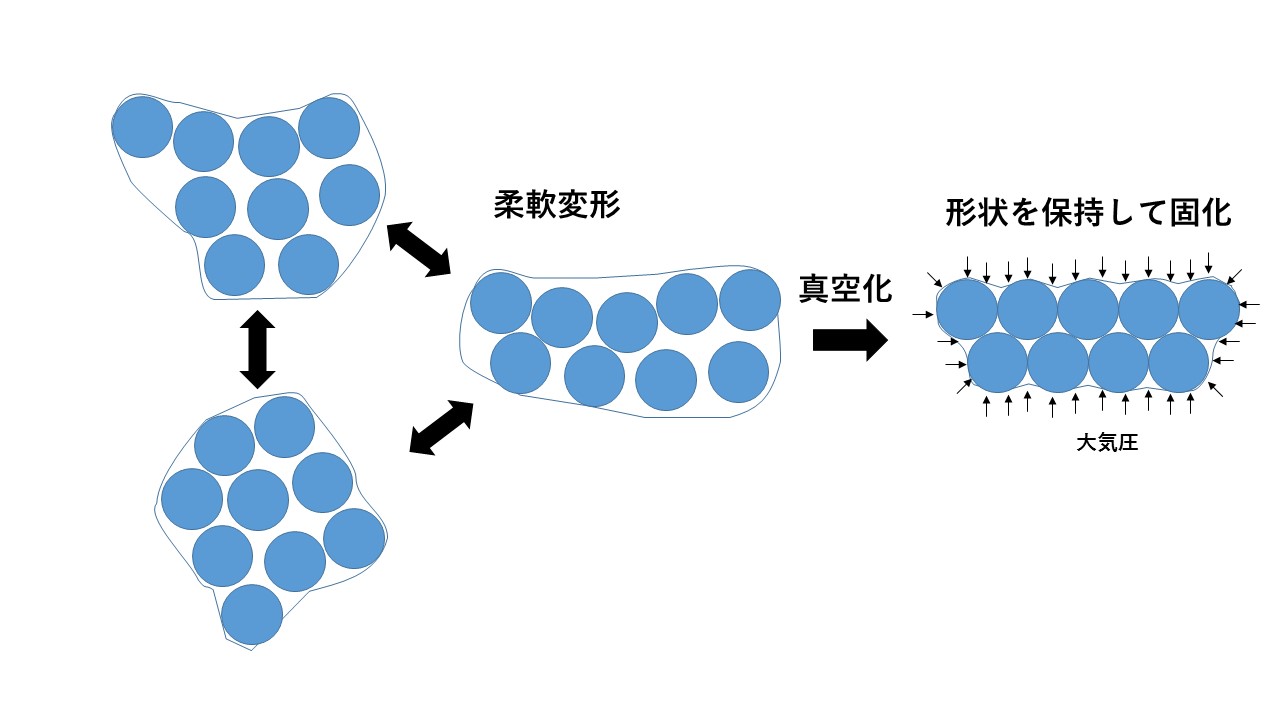
図1 粒子を含む柔軟な袋は内部の空気を抜くと固化する
はじめに
粒子を詰めた柔軟な袋の内部の空気を排出すると、粒子どうしが凝集し、袋全体が硬くなります(図1)。そして、空気を袋の中に戻すと、元の柔らかい状態に戻ります。このメカニズムは、骨折や救急搬送などの際に身体を固定する器具(陰圧式固定具)として利用されてきました。また、近年は、多様な形状の物体を把持するためのロボットハンドとしても利用されています。柔軟で軽量であるこの機械要素は、これまで様々な用途への応用が研究者によって提案されてきました。また、粒子以外の物体を入れた他の構造の機械要素も多数提案されています。このホームページでは、これまでに開発されたこれらの機械要素の特徴とその応用例を紹介します。
粒子型要素
袋に封入された粒子は、袋の内部と外部の圧力差がない場合には自由に動くことができます。したがって、袋が柔軟な場合には、袋は様々な形状に変化できます。袋の内部の空気を抜き、内部を真空化すると、袋は縮み、袋に押された粒子は凝集して摩擦力により互いに結合します。このとき、袋はその形状を保ったまま硬くなります。内部の真空圧が低いほど、粒子間の接触圧は大きくなって摩擦力も増えるので、より硬くなります。円筒形の要素の場合、その剛性(外力を変形量で割った値)は真空圧に比例することが確認されています[1]。
(動画)円筒形の粒子型要素
真空化により生じる剛性の大きさは、粒子の形状、素材、外膜の素材などによって変化します。真空化後の機械要素の硬さは、粒子と同じ素材で形成した物体を外膜でコーティングしたものと似た特性を持ちます。たとえば、ゴム球を内蔵した要素の場合、真空化後の機械要素はゴムのような硬さとなります。したがって、より硬い機械要素とするには硬い粒子を用いたほうが有利です。しかし、一般的に硬い粒子は重くなります。粒子の形状や素材による摩擦力の違いは、真空化時の剛性だけでなく、大気圧時の剛性にも影響することに注意が必要です。球状の粒子の場合にはさらさらと変形できますが、ごつごつした形状の粒子を入れるとごわごわと変形しづらくなります。過去の研究では、発泡スチロールビーズ、プラスチックビーズ、コーヒー粉などがよく用いられています。
真空化により生じる剛性は外膜の影響も強く受けます。真空圧で生じる粒子間の結合は、圧縮方向やすべり方向に対する変形には強いですが、粒子が離れる方向の変形には抗力を発揮できません。粒子が離れる変形(引張変形や曲げ変形)の剛性は外膜の弾性に強くされます。したがって、ゴムのような柔軟な素材よりも、塩化ビニルなど伸びにくい素材を外膜に用いたほうが高い剛性を発揮できます。しかし、伸びにくい素材を外膜に用いた場合には袋の柔軟性が小さくなりますので、変形可能範囲が小さくなったり、変形時に皺が生じたりするといった問題も生じます。
さまざまな工夫
粒子を均一に分布させる方法
粒子型の要素は任意の形状で作成することが可能です。しかし、粒子は重力によって移動するため、要素の中に隙間ができることがあります。隙間は要素の剛性を低下させるので、変形時にも粒子が偏在せず均一に分布していることが必要です。粒子の偏在を防ぐ方法としては空気を通す膜で内部を複数の空間に分けることが行われています(図2)。また、変形時に大きな折れが生じることを防ぐために、膜に硬いフレームをつけることも行われています。
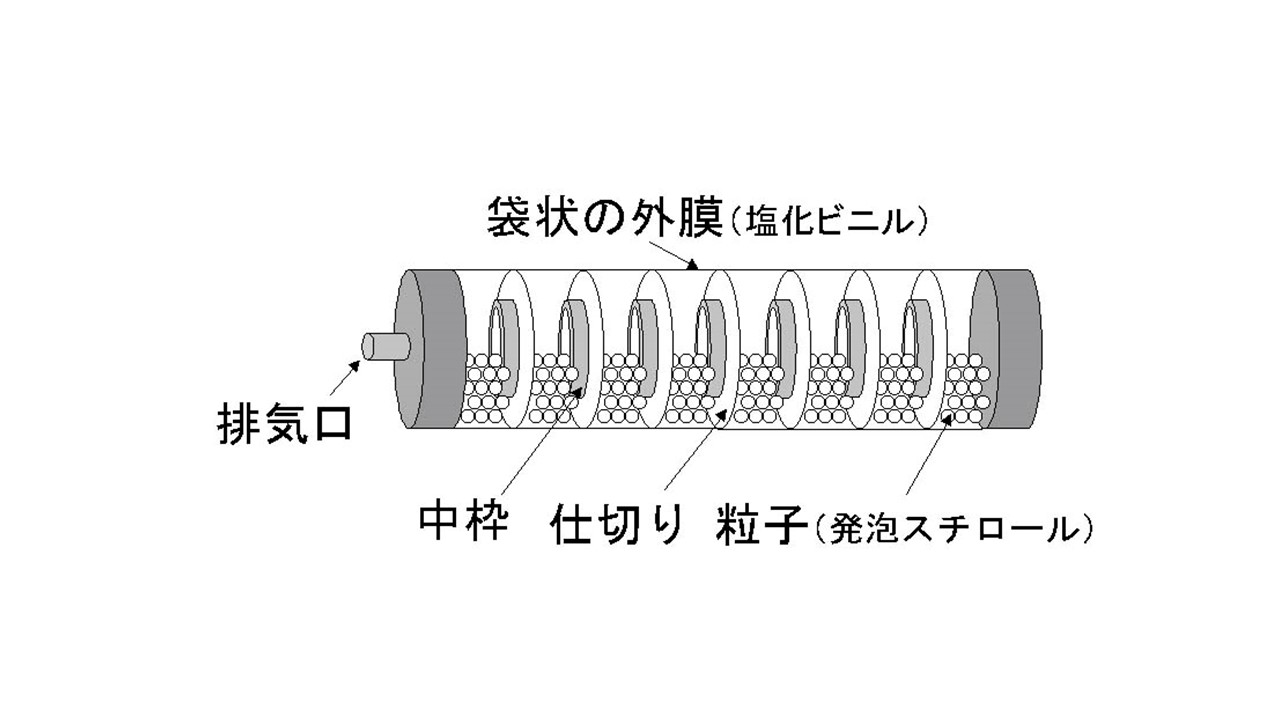
図2 粒子が偏らないように内部が仕切られた粒子型要素
(動画)内部を複数の空間に分けて板状にした粒子型要素
表面の皺をなくす方法
上述したように伸びにくい素材を外膜に用いた場合には、変形時に皺が生じやすくなります。また、伸びやすい素材を用いた場合でも、外膜が伸びると復元力が発生するため、要素の柔軟性が損なわれます。そこで、図3に示したように、外膜をテープ状に分割して重ね合わせ、テープどうしがスライドすることで、抵抗力なく伸び縮みできる構造が提案されています[2]。この構造の外膜は真空化時にはテープ同士が密着して滑らなくなるため、伸びなくなります。
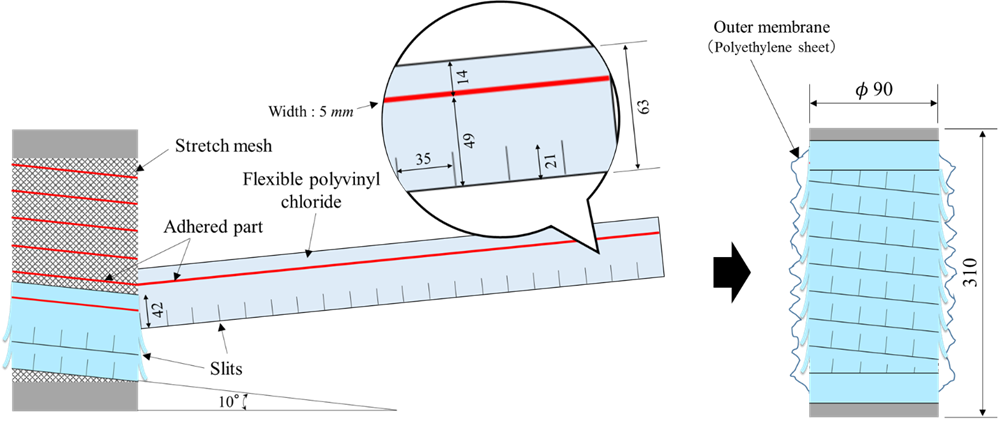
図3 伸縮可能で内部を真空化したときに伸びなくなる外膜をもつ粒子型機械要素
(動画)外膜が伸縮可能な粒子型要素
能動的に動かす方法
空気圧によって縮んだり、曲がったりする柔軟アクチュエータが多数開発されています。粒子型要素に能動的に動く機能を付加することも可能です。図4は、円筒形の粒子型要素の内部に空間を設け、内部空間の圧力によって能動的に伸び縮みする機能を持たせたものです[3]。ベローズ型空圧アクチュエータを円状に配置し、中心に粒子型機械要素を配置して、象の鼻のように変形し、同時に粒子型機械要素で剛性を制御するロボットも開発されています(図5)[4]。
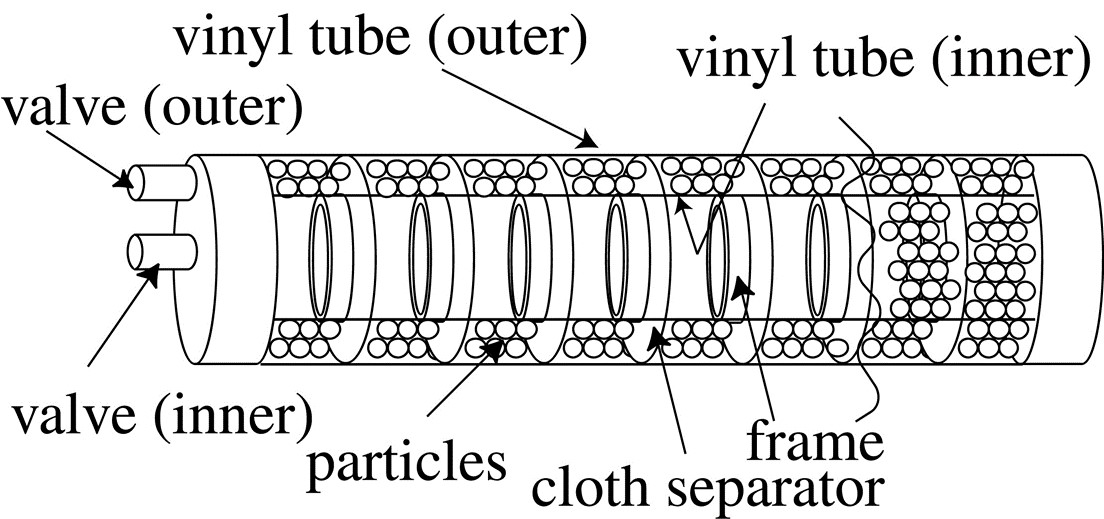
図4 能動的に伸縮できる粒子型機械要素
(動画)ジャバラを内蔵した粒子型要素。内蔵したジャバラによって能動的に伸縮し、粒子部分の真空化により剛性調節できます。
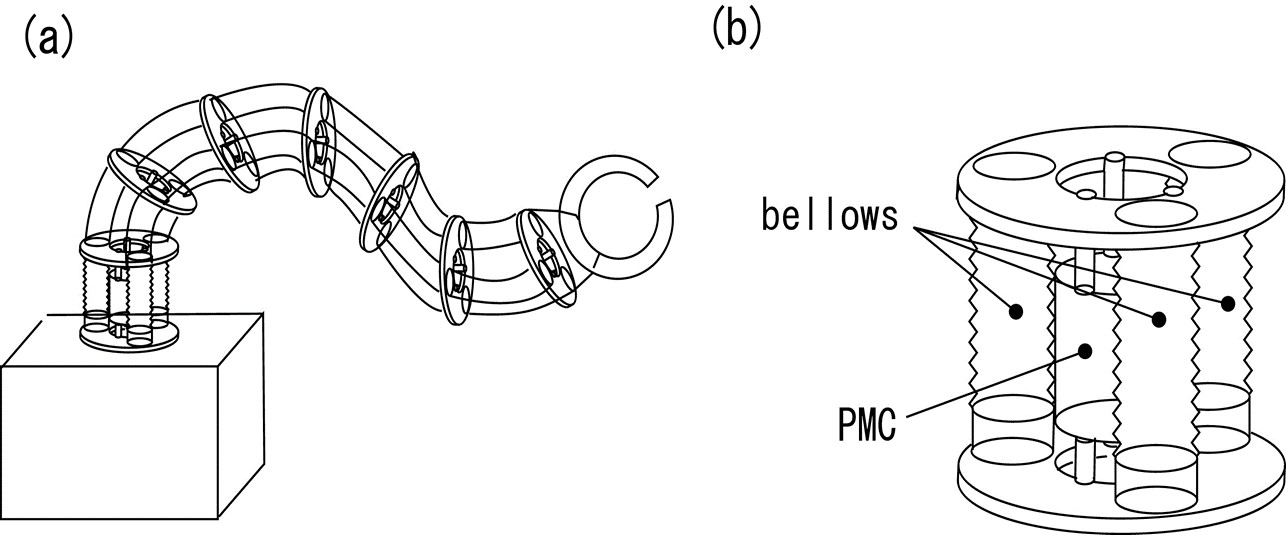
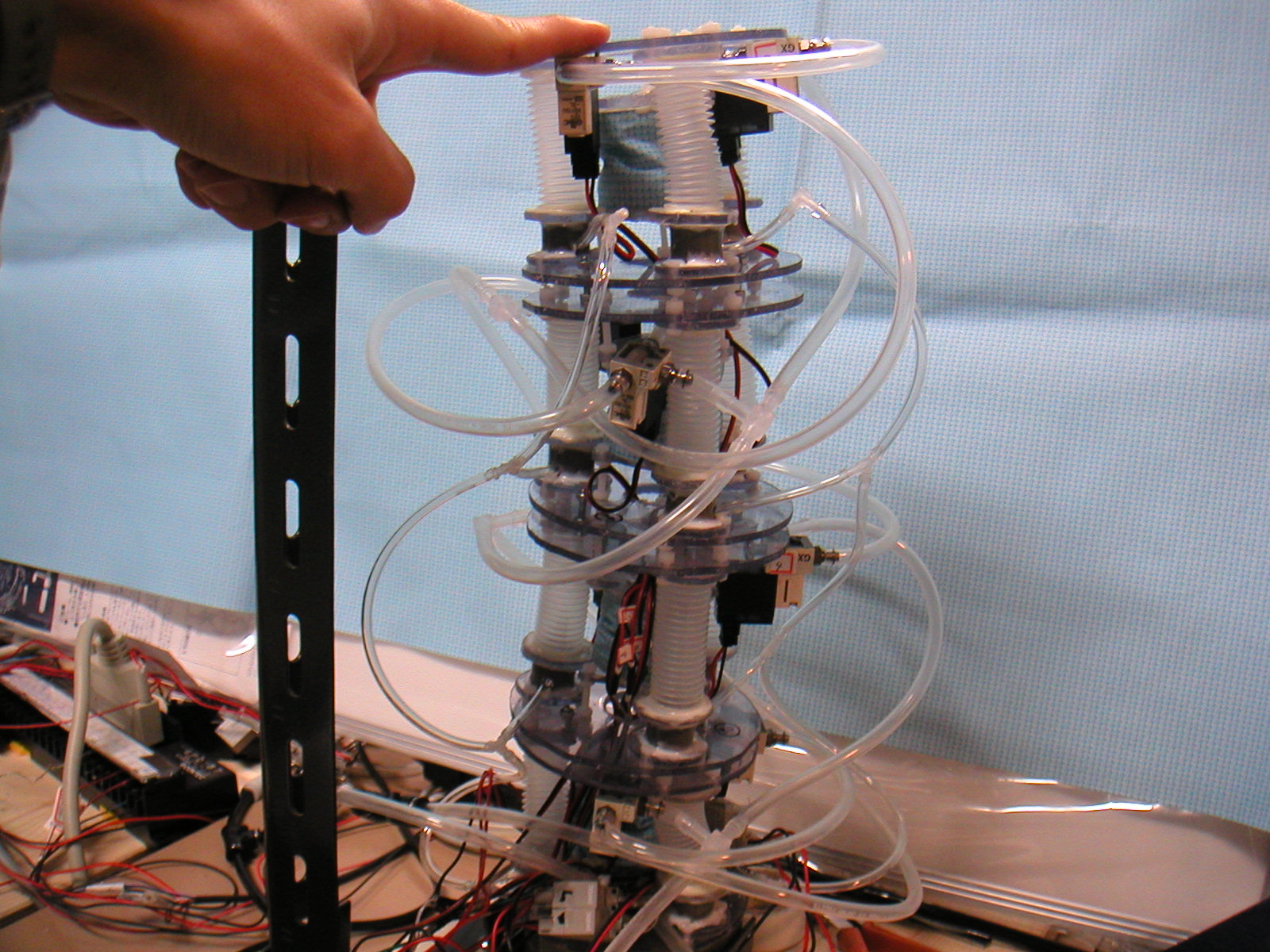
図5 象の鼻のように変形するロボットアーム
変形可能範囲を増やす方法
粒子型要素の中に棒を挿入し、その棒の動きを粒子凝集により拘束する機構が提案されています(図6)。この機構は回転だけでなく並進も可能なフレキシブル関節のブレーキとして利用することが可能です[5]。
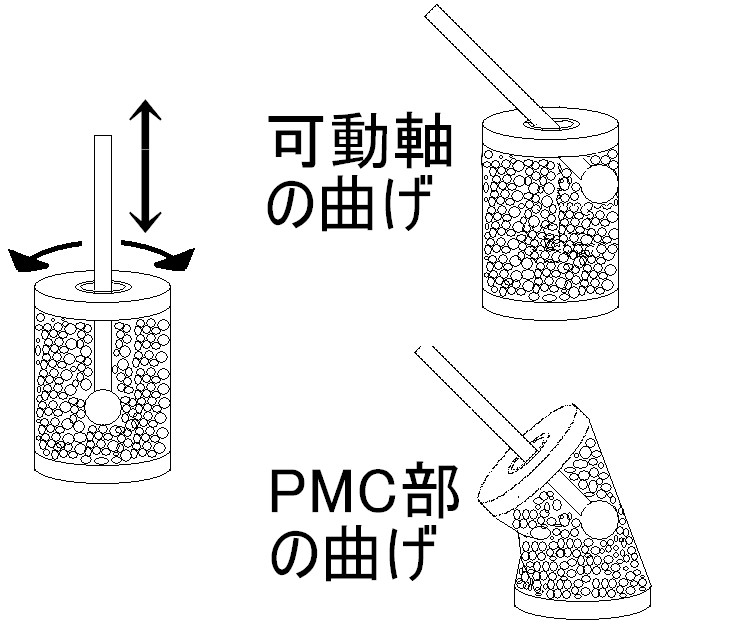
図6 回転と並進が可能なフレキシブルブレーキ
積層シート型(レイヤージャミング)・結束ファイバ型(ファイバージャミング)
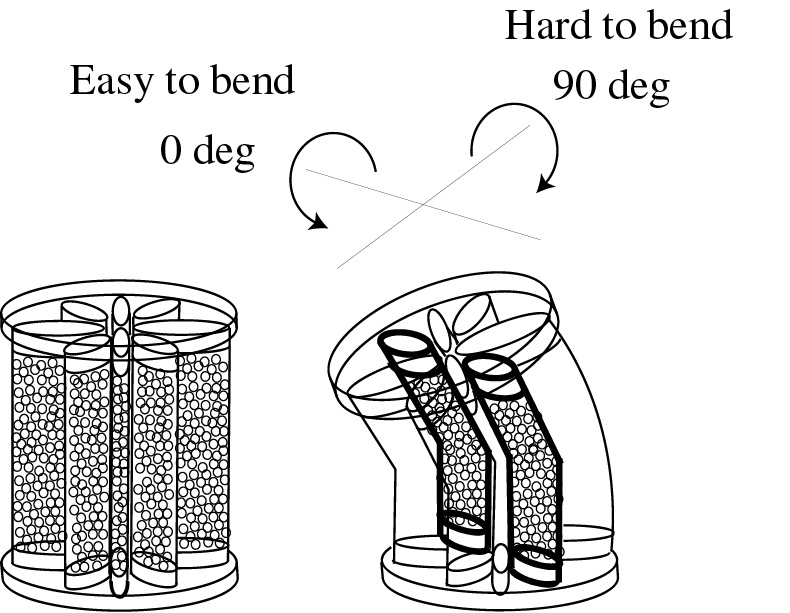
粒子型要素は薄く作成することが難しい問題があります。一方、複数のプラスチックシートを積層して袋で覆った要素は薄い要素に適しています(図7)[6]。この要素が曲がるときは、紙製のノートのように各シートが互いに滑ります。したがって、内部を真空化するとシートどうしが密着して1枚の厚いシートとなり剛性が増します。積層シートでは1方向の曲げはできても、2方向の曲げ、つまり球面を形成するような曲げ変形は行えません。これに対して、短冊状のシートを編み合わせたり[7]、うろこ状のシートの小片を組み合わせたりして[8]、柔軟性を増した機構も提案されています。結束ファイバ型要素は束ねた硬質繊維を内蔵した円柱状の要素で、積層シート型要素と同様に内部真空圧によって剛性が変わります。この要素では2方向の曲げとねじり変形が可能です。

図7 積層シート型要素
(動画)積層シート型要素
小片シート連結型
積層シート型要素は尖った曲面を形成するような曲げ変形ができません。これに対して小片シート連結型は、高い柔軟性と高い剛性を同時に持ちます[9]。図8に示すように、両端に穴を開けたプラスチックシートの小片を互い違いに重ね、穴にワイヤを通して重ねたシートを連結した構造の機械要素です。ワイヤを通す穴はワイヤよりも大きい長方形であるため、隣接する小片シートは接続ワイヤを中心として回転できるだけでなく、2方向にすべることもできます。これにより、小片シート連結型要素は2自由度の曲げだけでなく、伸縮も可能です。なお、図9に示したような真空圧で操作できる軽量なディスクブレーキ型の要素も開発されています[10]。
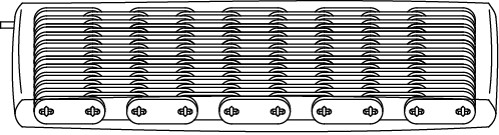
図8 小片シート連結型要素
(動画)小片シート連結型要素で作成した円筒
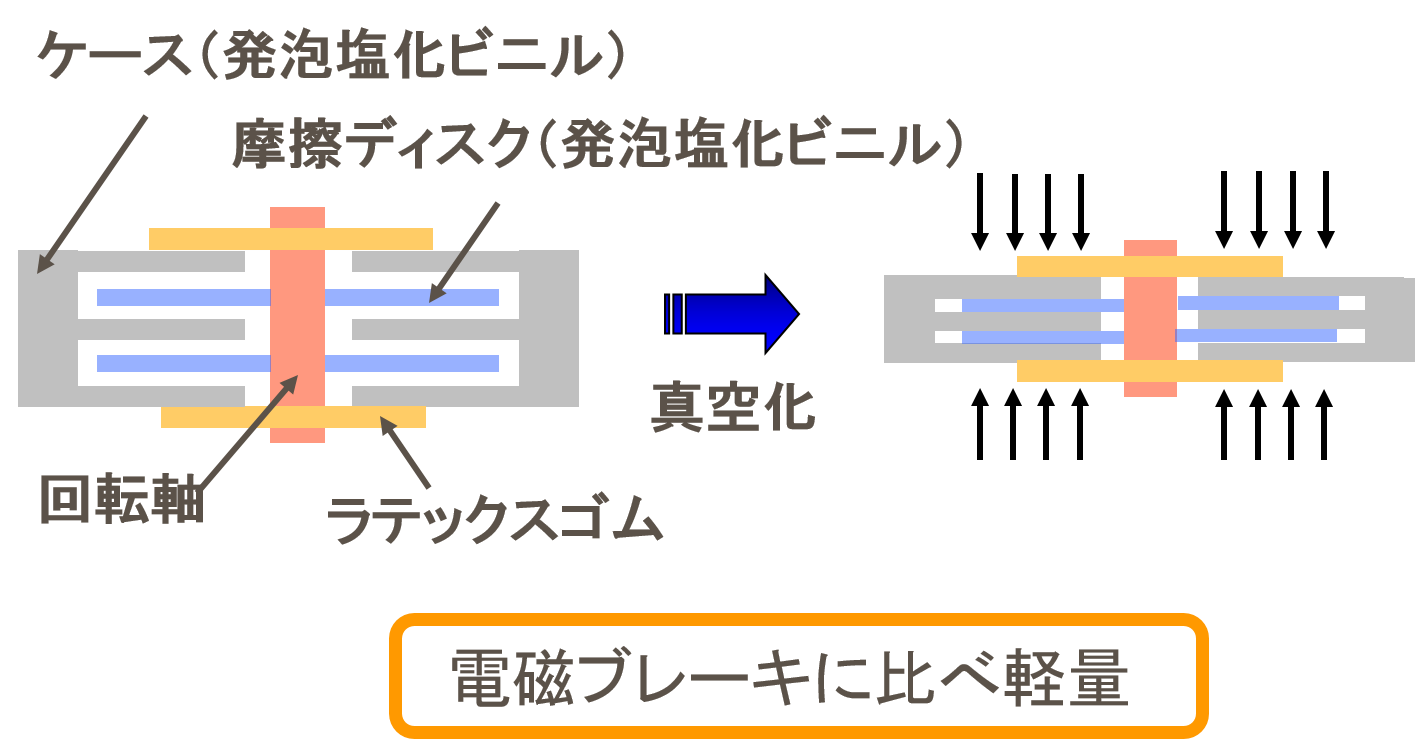
図9 真空式ディスクブレーキ
(動画)真空式ディスクブレーキ 体重支持装具に使用したもの
積層編み物型要素
積層編み物型要素は伸縮性のある編物を積層し、袋で覆った機械要素です(図10)。この要素はFabric-Jamming Sheetとも呼ばれます。上述した他の機械要素と比べて高い柔軟性を持ちます。また、薄い形状とすることが容易です。編物は素材の繊維の伸縮に加えて編み目の変形によって伸び縮みします。内部を真空化すると、重なり合った編み目が固定されるため、編み目の変形が行えなくなります。このため、伸びにくい繊維を用いた編物で作成した積層繊維型要素は内部の真空化により固化します[11]。
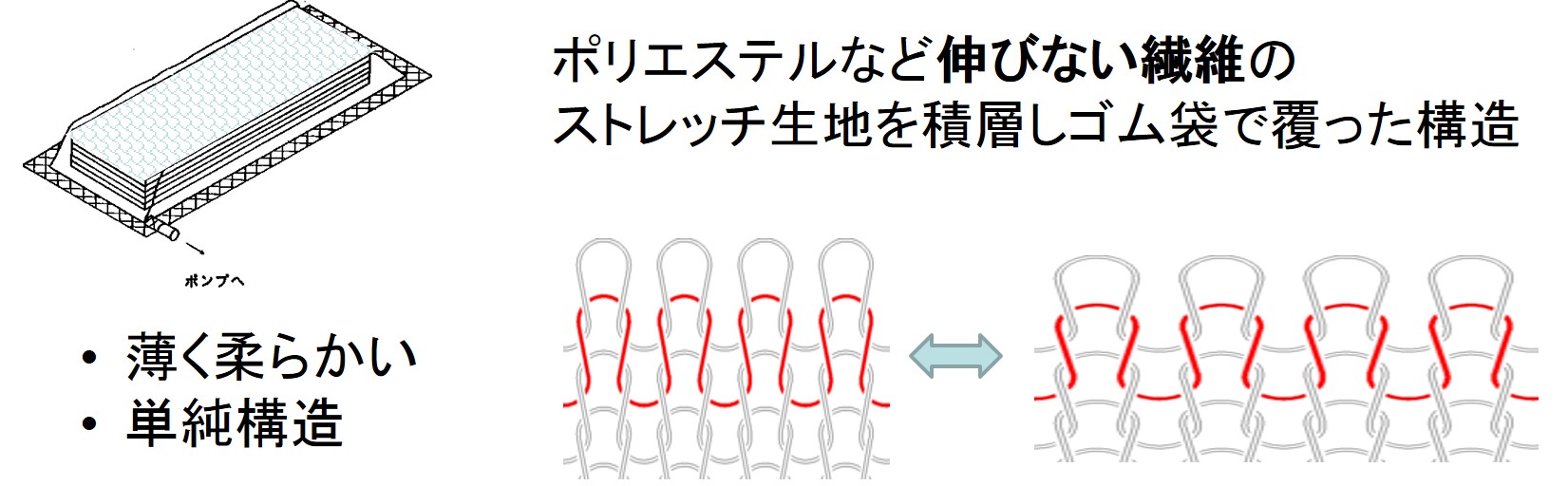
図10 積層編み物型要素(Fabric-Jamming Sheet)
(動画)積層編み物型要素 伸縮できます
(動画)積層編み物型要素 形状固定の様子
(動画)積層編み物型要素 およその硬さ
自動巻き付き機能付き要素
自動巻き付き機能付き要素は、空気を抜くと物体に巻き付くように変形し、硬くなる機械要素です(図11)。従来の要素を物体や身体に巻き付けて固定する場合、手で対象物に沿うように変形させた状態で空気を抜き硬化させる必要があります。このとき、隙間なく巻き付いた状態で硬化させるのは難しく、手間がかかる問題がありました。これに対して本要素では空気を抜くとスポンジが収縮して曲げ変形し、対象物に沿うとともに内部が真空になるので粒子部分が硬化し、要素全体が固化します[12]。この要素を用いたロボットグリッパーも開発されました[16]。 また、類似のメカニズムを用いたリング状のグリッパー(ゴムバンド型グリッパー)も開発されました[17]。ゴムバンド型グリッパーは、さまざまな形状に隙間なく優しく巻き付くができ[18]、豆腐も持ち上げられることを確認しています。
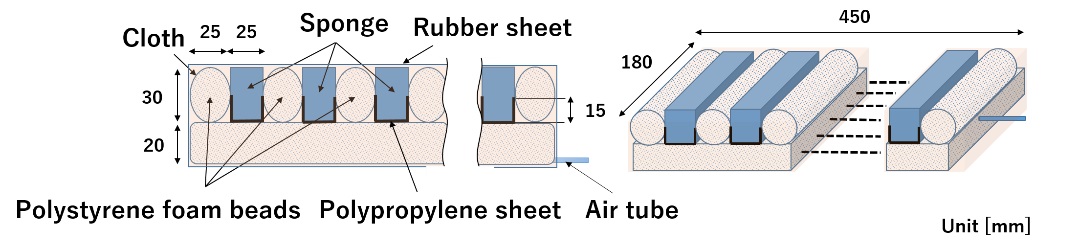
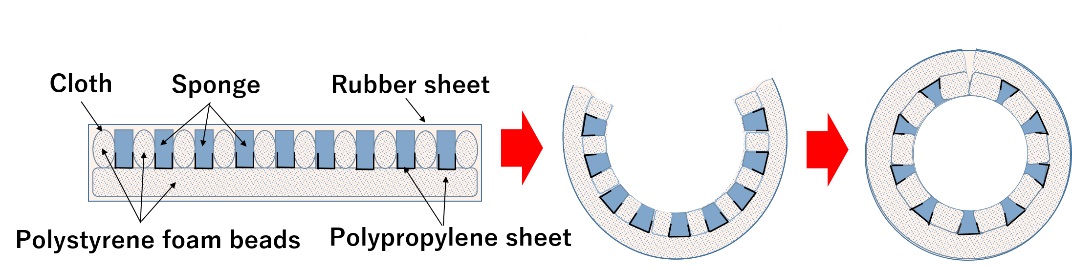
図11 自動巻き付き機能付き要素
(動画)物体に巻き付く様子
(Youtube)Vacuum-controlled adaptable gripper
応用例
本研究室でこれまでに開発を行った応用例を以下に示します。
ギプス、キャスト、シーネ、サポータ
(動画)連結型要素で製作したギプス
(動画)上記ギプスをハンマーで叩き、上に重りを載せる。
力覚提示装置、触覚提示装置
(動画)粒子型要素で製作した手指装具。硬いものを握る感覚が提示できます。[13]
(動画)積層編み物型要素で製作した手指装具[11]
ジョイスティック型力覚提示装置[14]
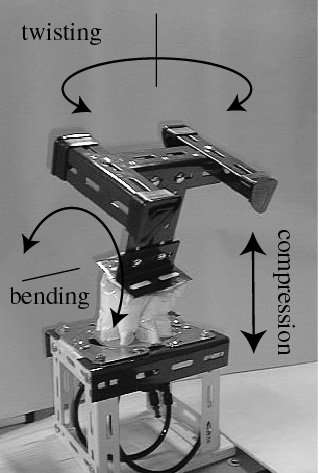
身体装着型力覚提示装置[1]
PMCを手首と胴体に固定することで、手先に粘弾性を呈示する装置を開発しました。本装置では、装着者に水かき感覚(粘性)や壁への接触感(剛性)を呈示することができます。

(動画)両手で力を感じながらブロックを操作するテトリスゲーム
型取り
(動画)積層編み物型要素による物体の型取りの様子です。
(動画)要素を対象物に真空吸着で貼り付け、その後、要素を硬化して取り外しています。
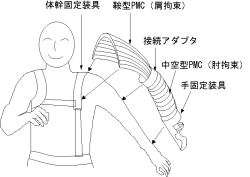
機能的装具、トレーニング装具[15]
肘関節、肩関節を固定または関節運動に負荷を与える機能装具への応用です。 一つの装具で多彩な運動に対応できます。

癒しグッズ
(動画)水袋のまわりを発泡スチロール粒子で覆ったもの。小麦粉を練った生地のような感触が得られます。
(動画)粒子型要素をを取り付けた円筒型水袋
身体装着型椅子[10]


天井作業補助装具[5]

FAQ
どれくらいの硬さですか?
粒子型要素にて説明したように、外膜が柔軟な素材である場合、真空化により発揮される最大剛性は内蔵物と同じ素材で作成した同形状の物体を超えることはありません。内部が大気圧状態のときは、とくに粒子型、小片シート連結型、積層繊維型においては大変柔軟です。ダイナミックレンジの大きい可変剛性要素です。硬さや柔らかさの度合いをイメージしていただけるように、各要素の動画を用意しましたのでご覧ください。どのように空気を抜けばよいのですか?
内部の空気はハンドポンプまたは電動ポンプで抜くことができます。剛性を得るために空気を抜かなければならない量は要素内部の容積に依存します。要素の剛性はほぼ内部真空圧に比例するため、より高い真空圧としたほうが高い剛性を発揮できますが、通常の安価な電動真空ポンプやハンドポンプで発揮できる最大真空圧(-80kPaから-90kPa程度)でも、最大真空(-101kPa)の場合と比べて約8~9割程度の剛性が発揮できます。真空発生器を用いて圧縮空気で空気を抜くこともできます。どのくらいの期間、硬さを保つことができますか?
真空圧が持続する限り硬さは保たれるはずです。真空圧の持続時間は密封状態や外膜の素材により変化すると思われます。私の経験では、市販の弁で密封した手作りの要素で2~3日は真空圧を保つことができました。どのような形状が作れますか?
要素の種類によって異なりますが、基本的には形状に制限はありません。どのように硬さを調節できますか?
この機械要素の剛性(硬さ)は内部真空圧に比例するため、内部真空圧を制御することで剛性を調節できます。電空比例弁などの圧力制御装置を用いれば、リアルタイムに剛性を制御することも可能です。参考文献
[1]満田 隆, 久下 幸子, 若林 将人, 川村 貞夫粒子内蔵型機械拘束要素の開発と身体装着型力覚呈示装置への応用
計測自動制御学会論文集, Vol.37, No.12, pp.1134-1139, 2001.
doi:10.9746/sicetr1965.37.1134 (open access)
[2]北川 湧麻, 満田 隆
粒子凝集による可変剛性要素(皺が生じない外膜による剛性強化)
日本機械学会論文集, Vol.83, No.851, No.17-00107, 2017.
doi:10.1299/transjsme.17-00107 (open access)
[3]満田 隆, 若林 将人, 川村 貞夫
能動性を付加した粒子内蔵型拘束要素による力覚呈示
計測自動制御学会システムインテグレーション部門講演会論文集(Ⅲ)pp.119-120, 2002
[4]満田 隆, 川村 貞夫
可変粘弾性要素を用いた柔軟ロボットアームの開発
計測自動制御学会システムインテグレーション部門講演会論文集(Ⅲ)pp.79-80,2002
[5]満田 隆,堀渕 浩之
真空圧による粒子凝集を利用した球関節ブレーキ
春季フルードパワーシステム講演会講演論文集,pp.68-70, 2005年5月(東京)
[6]S. Kawamura et al.
Development of passive elements with variable mechanical impedance for wearable robots, in Conf. Rec. 2002 IEEE International Conference on Robotics and Automation, pp. 248-253.
[7]Ou, J., Yao, L., Tauber, D., Steimle, J., Niiyama, R., and Ishii, H.
Jamsheets: thin interfaces with tunable stiffness enabled by layer jamming. In Proceedings of the 8th International Conference on Tangible, Embedded and Embodied Interaction, ACM (2014), 65-72.
[8]J. L. C. Santiago, I. D. Walker, and I. S. Godage
Continuum robots for space applications based on layer-jamming scales with stiffening capability, in Conf. Rec. 2015 IEEE Aerospace Conference, pp. 1-13.
[9]満田 隆, 松尾 憲親
真空圧を利用した形状固定具(連結型機械拘束要素の力学特性)
日本機械学会誌論文集72巻719号C編, pp.2226-2231, 2006.
doi:10.1299/kikaic.72.2226 (open access)
[10]Takashi Mitsuda, Masato Wakabayashi, Sadao Kawamura
Development of wearable chair using pneumatic passive elements
Journal of Robotics and Mechatronics, Vol.16,No.3, pp.256-263, 2004.
(open access)
[11]Takashi Mitsuda
Variable-stiffness sheets obtained using fabric jamming and their applications in force displays
IEEE World Haptics 2017, pp.364-369, 2017年6月(Munich, Germany)
doi:10.1109/WHC.2017.7989929
Accepted Manuscript (pdf)
[12]大塚 晋作,満田 隆
真空圧により形状と剛性が変化する機械要素の開発
日本機械学会論文集, Vol.85, No.876, No.19-00046, 2019.
doi:10.1299/transjsme.19-00046 (open access)
[13]満田 隆,川村 貞夫
粒子内蔵型機械拘束要素による触覚呈示装置の開発
日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集, 1P1-F10, CDROM, 2002
[14]Takashi Mitsuda, Sachiko Kuge, Masato Wakabayashi, Sadao Kawamura
Haptic displays implemented by controllable passive elements
Proc. of the IEEE Int. Conf. on Robotics and Automation, pp.4223-4228, 2002
[15]満田 隆, 若林 将人, 川村 貞夫
粒子内蔵型受動要素を用いた上肢トレーニング用装具の開発
日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集, 2A1-3F-E3, CDROM, 2003年
[16]Takashi Mitsuda, Shinsaku Otsuka
Active bending mechanism employing granular jamming and vacuum-controlled adaptable gripper
IEEE Robotics and Automation Letters, Vol.6, No.2, pp.3041-3048, 2021.
doi:10.1109/LRA.2021.3058914
[17]Ko Yamada, Takashi Mitsuda
A vacuum-driven rubber-band gripper
Robomech Journal, Vol.8, 16, 2021.
doi:10.1186/s40648-021-00203-7(open access)
[18]Takashi Mitsuda
Wrapping Objects with an Automatic Contraction Ring
Journal of Robotics and Mechatronics, Vol.34, No.6, pp.1424-1430, 2022.
doi.org/10.20965/jrm.2022.p1424(open access)