ABOUT
Biorobotics Laboratory conducts a wide range of research in robotics, cognitive psychology, and physiology with the theme of understanding the mechanisms of the human mind and body and realizing flexible mechanical systems like living organisms.
Robotics
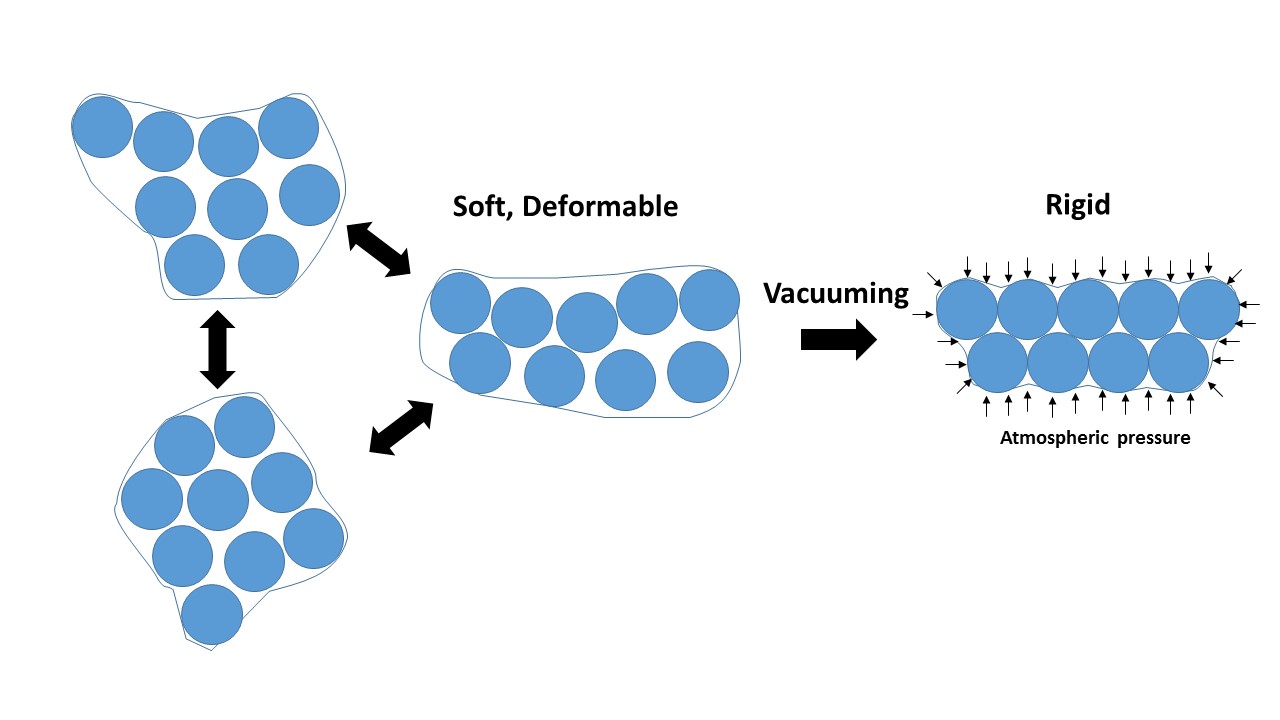
Mechanical elements whose viscoelasticity can be adjusted by the internal vacuum pressure (Particle jamming, Fabric jamming etc.)
We have developed various types of machine elements whose rigidity changed due to internal vacuum pressure since 2000.
Please visit the detail page. Click!
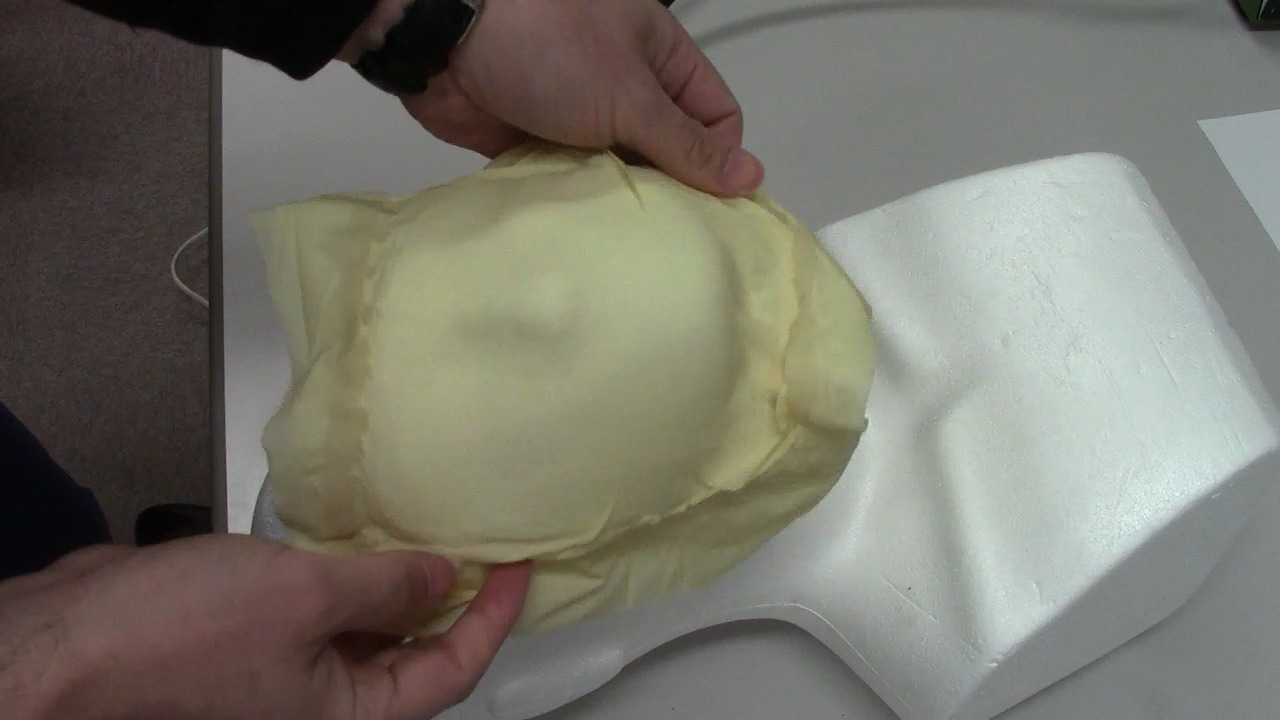
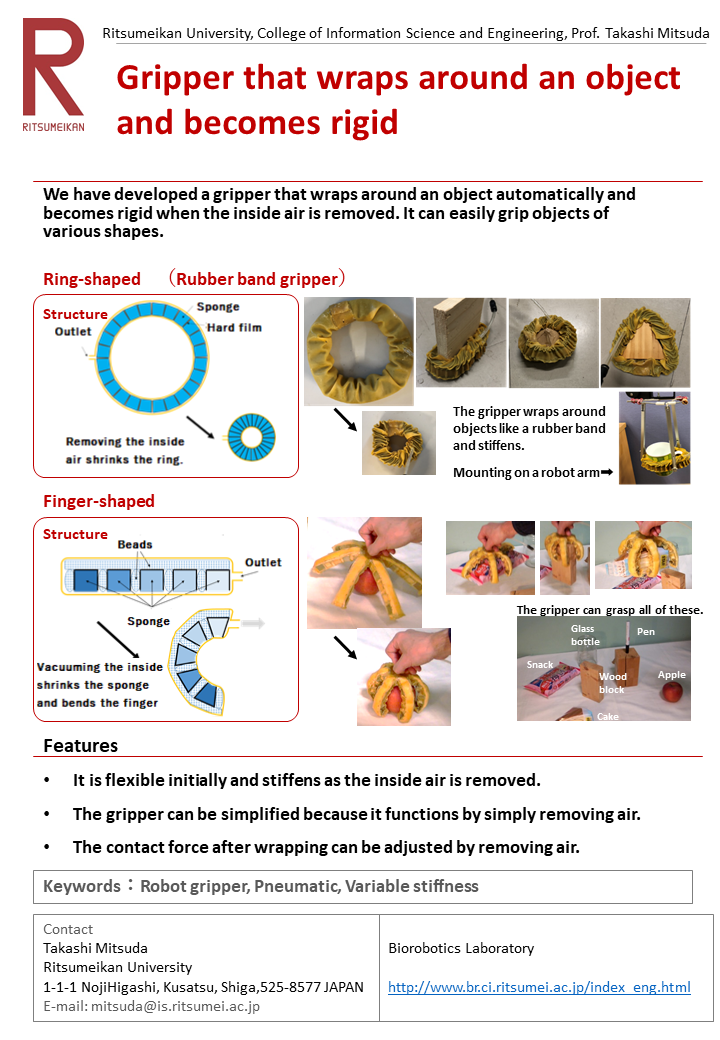
Soft gripper
We have developed flexible grippers to gently grasp objects of various shapes.
Cognitive psychology
Mental processes involved in making preference judgments
How does the gaze behaviors and the sampling behaviors interact with preference judgments?


Physiology
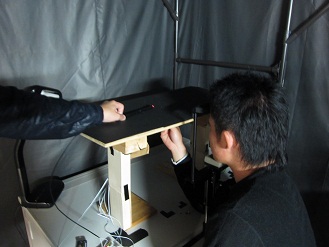
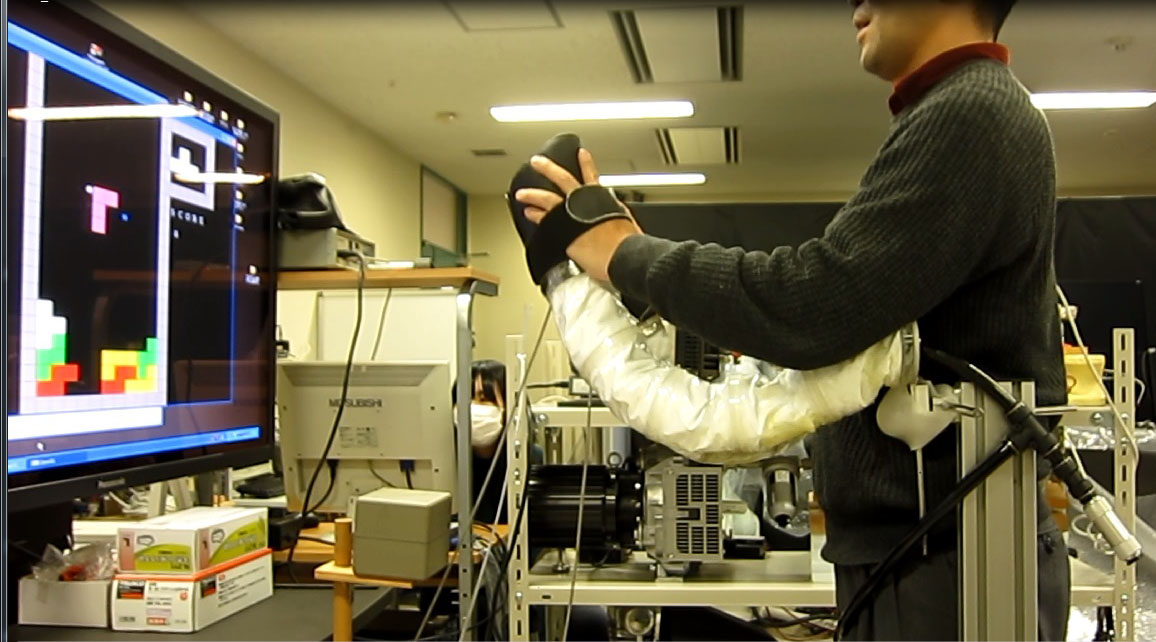
Force display by the use of constrictive pressure on limbs
This study investigates a force display by the use of constrictive pressure on limbs. Force display systems in markets display a force using a robot. In contrast, the proposed force display displays a force using an illusion provided by the constrictive pressure on the limbs. The system is more lightweight than the conventional force display systems, and it can provide better safety. Applying a constrictive pressure on the distal part of a forearm provides a feeling of adding a force to an object by hand, such as pushing an object or holding an object. Applying a constrictive pressure on a thigh and lower thigh and lifting the feet up and down to coincide with the arm swings provide a feel of walking while sitting in a chair. A virtual diving underwater system has been developed using this technology.


Visuo-motor transformation in arm reaching movements
How does the brain create an arm reaching motion towards an object?
1. What kind of coordinates is used for recognizing a spatial position?
2. How does the brain plan the arm reaching movements?
3. How does the brain activate muscles?
We have investigated them from the point of view of Robotics in ways of psychophysics experiments and non-invasive brain measurement by fNIRS.